|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fish_in_a_Barrel

Joined: 30 Sep 2006
Posts: 673
Location: Perth, Western Australia


|
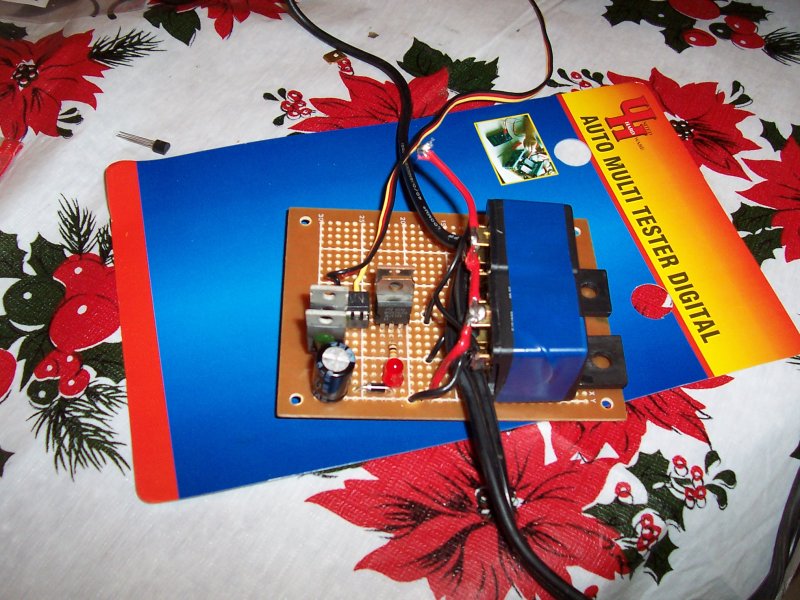
I took my it in to uni today, for the obligatory oooh aaah session. I just had a drill motor hanging off it, going up, down, full forward to full back, showing all of the sparking at the motors brushes  . I like it. . I like it.
Easy question. Isn't it a better idea to use a diode arrangement like on a H-bridge circuit, rather than capacitors, to prevent the relays from arcing? It makes much more sense to me to use diodes. They have already taken out all of the ringing in the motor = no singing  
Also, to run it at a higher voltage I was going to run the coils from the 12V reg. Instead could I put a resistor series with the coils?
|
 Thu May 17, 2007 7:25 pm
Thu May 17, 2007 7:25 pm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|

 RoboWars Australia Forum Index
-> Builders Reports
RoboWars Australia Forum Index
-> Builders Reports