|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Knightrous
Site Admin

Joined: 15 Jun 2004
Posts: 8511
Location: NSW


|
Well it's time to move onto the next phase. The current 1 wheel version of MBX is a dead end. I'm getting way too much friction from the base on the ground and using castors/skids/wheels have all proven useless. In MeltyB, the 1 wheel design worked quite well, as the momentum actually picked the base up off the ground, but it doesn't seem to scale that well. I've reached the limit of the winch motor and the batteries in the hunt for more power and more speed. Death By Translation (Kevin Barker and Rich Olso's effort) seems to work in the 30lb weight with 1 wheel, but they are running some expensive Lipol and a Magmotor. Two things I can't afford 
I had the accelerometer working to a point at home, where the heading was stable with a small amount of drift, but when I took it to the QRSC garage battle, the concrete had a lot more friction then the smooth stuff in my garage. It seems to have caused all my calibration efforts to go out the window and even my manual code I've used previously failed to work. So with the problems out layed, it's time for the next build.
MBX 0.2B
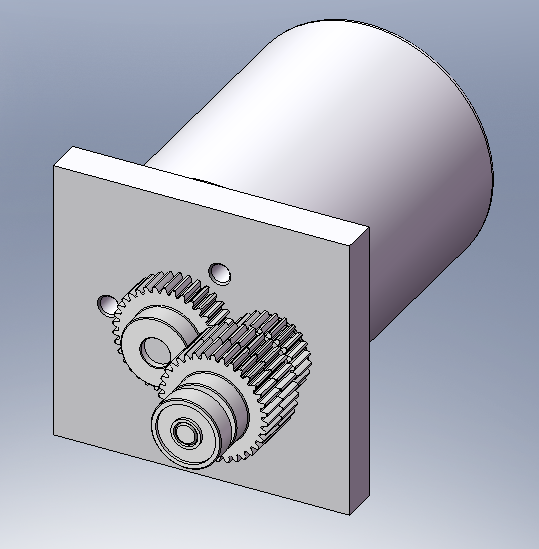
Going to two wheels like MBX 0.2 (Which probably would have worked if I hadn't rushed and bodged it up so much), but it will be a bit of a hybrid. I'm going to use a Brushless 5330 for one wheel, and a scooter motor on the other, the brushless with it's massive torque and power will be run flat out all the time, providing a good amount of spin. The scooter motor will run as the translation control, it will do the pulsing translation stuff to make it drive. The scooter motor should only have to spin fast enough with a bit of torque to keep up with the brushless.
This covers the problem of reduced duty cycle on motors or the intricate process of trying to pulse brushless motors at super high speeds for a full brushless drive. Both motors will be run on 10cell A123 (33v), which seems to be well in the limit of the motors from when Glen tested the 5330's and scooter motors on 10cell in Visceral. The scooter motor will be geared up 1:2 to match the speeds of the brushless, which will also work well for the braking process of translation with the reverse ratio.
Hope to start on a test bed soon, maybe even have a running version ready for the next QRSC event.
_________________
https://www.halfdonethings.com/
Last edited by Knightrous on Thu Jun 11, 2009 8:54 pm; edited 1 time in total
|
 Thu Jun 11, 2009 4:43 pm
Thu Jun 11, 2009 4:43 pm |
|
|
|
|
|
|

 RoboWars Australia Forum Index
-> Builders Reports
RoboWars Australia Forum Index
-> Builders Reports