|
|
Karmond
Joined: 16 Jun 2004
Posts: 97


|
Warning: Long post ahead!
I just want to say that I wrote this post in peices so it does go on for a bit, some parts include questions and some parts are just minor notes. Also where I say bot, I mean design. It's far from becoming a reality, but the more I learn the better it'll be. I want to thank those who've replied and appreciate any helpful suggestions. Some design features may seem foolish to you, so feel free to point them out (even the use of skirts again).
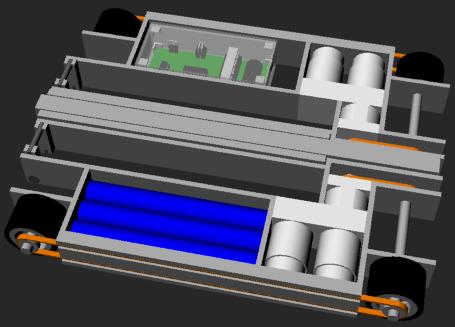
I drew about half of it (inner frame, motors, gearbox, wheels, cells) in Rhino 3D and I realised I wasn't able to fit everything in the width I had originally set aside, so to try and minimise width and avoid making it look like a square I changed the battery packs to be flat, 3 rows of 4 cells end to end. This gives them some space top and bottom (previously they were a valley style brick). This also made the bot longer, and it's now approx 400mm by 320mm + width of the side armour.
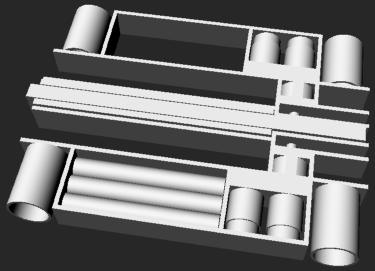
(Lifter arms are wrong, I just made them that size to see what was the largest length that would fit.)
I mentioned to Glen on Saturday that the best way to have a linear actuator fit would be if it was straight (unlike actuators which have the motors running parallel or at right angles with the cylinder). In the current design there's about a 300mm by 40mm by 40mm space for it. The actuator will need to be hinged around where the gearbox for the motor is. An advantage for having it this long is that the motor (which would be the largest part if I use a RS550) would pivot only 1/5 of the height of what the end of the actuator pivots. This essencially stops it from hitting the top and bottom.
Actuator construction I'm still in the dark about, I don't know what's required in terms of bearings, switches, cylinder thicknesses etc. I would also like to know if the following is possible, and bear with me as I know little about electronics: I want to have one of the AUX outputs extend the actuator until it reaches point B, where a switch is triggered and the actuator stops extending. If there is no AUX current flowing the actuator retracts until point A where a switch is triggered and the actuator won't retract further.
I'm guessing that the actuators will probably be the main roadblock in this design.
Prior to drawing the bot I realised that the left side and the right are only connected by the rear armour, the base and the lifting mechanism so I'll need to use something tough for the base or the bot will end up very warped after a good knock. First thought was 1.8 mm Titanium for the base which admittedly would be very expensive.
Another thing I picked up from the event on Saturday was that polycarbonate will suffice for the top so I'll use 3mm for that.
I'll need to source some gears for the dual gearboxes, I'll need 6 spur gears with a pitch circle diameter >= 19.5mm. Looking in my HPC gears catalogue I have from a few years back getting the gears from them will cost about $80 + postage... So if I can get something like that locally that would be good.
I need to enquire about the possibility of having the wheels made from aluminium tube, welding a disc inside for the axle, and gluing rubber on the outside. This of course leads to the question of whether there are good suppliers of aluminium tube around (hmm seems http://www.performancemetalsaustralia.com.au/ has some), I need one with an outer diameter of about 1.75 inches (44.45mm). If you're wondering why I have imperial measurements it's because I've been using international sources to find out what fits.
Do people buy their pulleys and belts from somewhere or make them themselves? I'd like to look into the option of using belts however The pulleys need to be under 35mm diameter, preferably the smaller the better to leave some space for wires to fit around in those tight spaces. Also how wide/long would pulleys that small need to be? I wouldn't want to go much more than 10mm if at all.
Battery Cells are currently designed as 3600 MAH NiMH.
I've decided to design the inner walls with 5mm aluminium. Mostly just to save weight as I'm unsure how much some components will weigh at the moment. Hopefully the juicy soft gooey insides of my design will be protected by a thick candy shell which I have yet to decide on.
Outer walls will almost defiantly be steel as I don't think I can use too much Titanium at this stage. Thickness depends on how much weight I'll have to spare, but for drawing reasons, I'll just go with 5 mm steel for now to match the thickness of the inner walls, and adjust accordingly later on.
I still want to use skirts; Jolts skirts impressed me even though they don't really hinge much by design. I figure if I do end up building this bot and do use titanium for the base, I could just buy a larger piece and cut some skirts from the same sheet (How hard would it be to cut 1.8 mm Titanium anyway?)
Lifting mechanism I haven't put much thought into but I think I'll need to use steel for all of it. The arms could maybe be the same thickness as the outside walls to save money? I'll probably need to go box section steel for the lifting bar also. I'm not sure what are common sizes and how available they are but I'll need something about 1.5 inches high (38.1 mm). Rectangle section would be even better if it's available and if I could get 1.5 inches (38.1 mm) by 0.75 inches (19.05 mm) that would be ideal. The rods/axles would also probably need to be steel but I don't know about the thickness, something like 5 or 6 mm would probably be good but I'm not sure if that's thick enough to support the lifting mechanism. Anything much larger would look a little bulky as the bot isn't very tall.
Um, I've probably missed something along here somewhere but any comments would be appreciated.
|
 Tue Apr 03, 2007 8:50 pm
Tue Apr 03, 2007 8:50 pm |
|
|
|
|
|
|
|
|
|
|
Karmond
Joined: 16 Jun 2004
Posts: 97
|
quote:
Originally posted by Nick:
I have some thick wall ali tube in 40mm diameter; could you use thicker tread?
Yeah, I hadn't done research on the rubber yet, but you can always use something thicker than what you need and trim it down slightly, right? The number I threw out was just the best fit from a selection of sizes from
The Robot Marketplace
which is all imperial measurements.
quote:
Originally posted by Nick:
From my experiences with a four wheel bot with 50mm wide treads, your wheels are probably wider than they need to be. My bot did NOT like turning and basically hopped from wheel to wheel as it skid-steered. that wastes a heap of battery power and is harder on your gearboxes. For a 4 wheel design, I would go 25 to 35mm wide tread, unles the tread is hard & slippery.
Ok, good point, it had crossed my mind but since the wheels are so small I wasn't sure there'd be alot of grip. The wheels are really only that wide to fill out the space but making them smaller wouldn't be that much of an issue. 35mm is about half as wide as they are currently.
quote:
Originally posted by Nick:
I'm still not quite sure how the actuator fits in the design - can you write a bit more about that? Is it a four bar lifter mechanism? You can probably get by with aluminuim for most of the lifter and just use steel at the end for bash protection - the flippers in QLD use aluminium arms and have no problems.
I'm not even quite so sure myself. :p Basically I'm hoping I could make an actuator that's straight in design, so it goes from a motor, to a gearbox (ring gear like the banebots [36mm gearmotor]) to a threaded rod. No belts or 90 degree gears like most actuators. The actuator would need to be hinged on the sides about where the gearbox is.
The lifting mech would be almost identical to Biohazard which you can get info from
here
. Although there would be differences with the actuators an how they pivot.
That's good to know about the ali, I was worried about spinners warping the lifter.
quote:
Originally posted by assassin:
Sorry I don't know but is this your first bot? Are you confident you can design and build this to meet NSW standards? The reason I ask is, I wouldn't like to see you spend so much time and money and then meet you first spinner and this happens: http://www.youtube.com/watch?v=ifBLBYwxe2Q or would I  thats a good vid! thats a good vid!
Its a real neat bot, build what you want to build but be realistic too. This may only come with experience, which might be why your asking the questions. So are you sure you can build this underweight and reliable?
It would be my first, and I know it's more complicated than it should be... But I'm not going to attempt to build this if I don't think I can.
As for that video, did you intentionally use one of the bot I'm basing my design on? :p Did you realise that Biohazard would probably be the most successful heavyweight ever? As for having it trashed, maybe... but how many featherweights in Australia have kept going in a single match until they have 4 sides ripped off, alot of the matches and videos I've seen has the drive/radio/battery fail before any major damage is done and the bot is spared.
P.S. Australia has no Full Body Spinners. :p
Last edited by Karmond on Tue Apr 03, 2007 10:37 pm; edited 2 times in total
|
|
Tue Apr 03, 2007 10:15 pm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

 RoboWars Australia Forum Index
-> Technical Chat
RoboWars Australia Forum Index
-> Technical Chat