|
|
|
|
Spockie-Tech
Site Admin

Joined: 31 May 2004
Posts: 3160
Location: Melbourne, Australia


|
It depends on how you have your ESC's and radio setup with respect to mixing/steering.
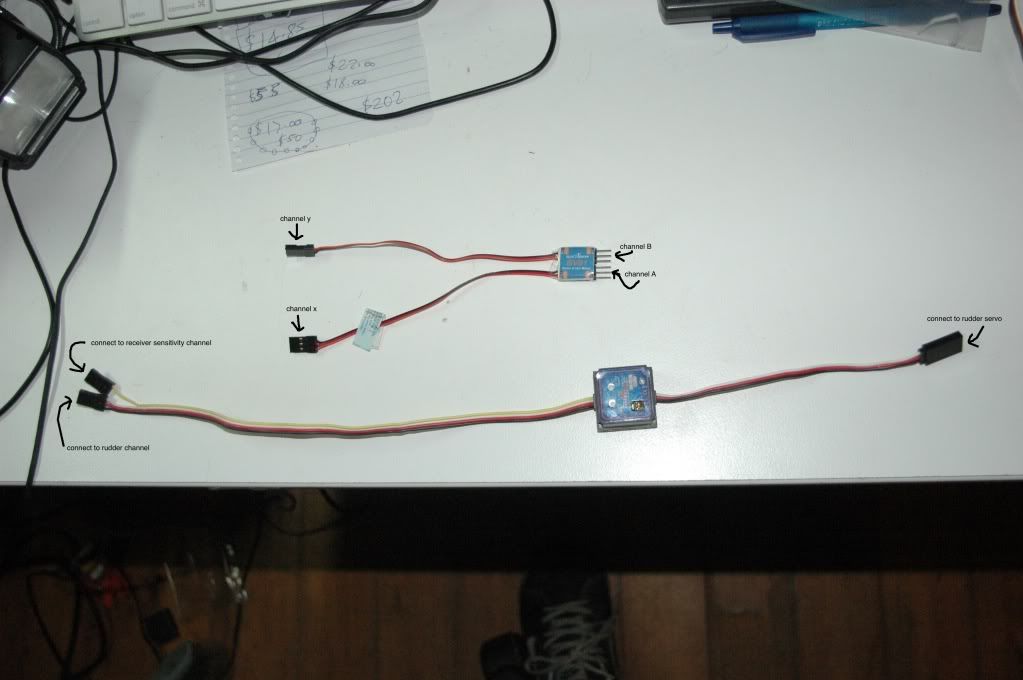
If you have one radio channel for for forward/backwards and one for left/right, with the mixing done in the ESC, then yes, the Gyro just connects in between then receiver and the ESC on the steering channel. Radio...>gyro...>esc.
The tricky part with most 401 style gyros is seting up and calibrating them for proper full-range travel (without tripping the ESC into Failsafe), and setting the sensitivity/delay controls high enough to give you tight steering, without going over the top into "hunting" where it oscillates back and forwards.
This is best done in person with the assistance of a gyro experienced roboteer, since the specifics of how to do it will depend on your personal equipment combo. The Radio channels, ESC, Gyro etc are all variable from model to model..
Futaba 401 gyros have remote-gain control that can be controlled from the radio if your radio supports it.. I dont know it the HK 401s do. it sounds like it from your description. If they do, use it.. sometimes if your drivetrain gets bound up in a fight (or loosened) or the drive power changes for some other reason (flat batteries), the Gyro can create control problems and its great to be able to turn a knob and switch it down or off.
Exactly where to connect it depends on your radio.. On Futabas, its usually channel 5.. find the Rx channel that relates to the small knob that most radios have on their front face.
When they are all dialled in, they are great enhancers to controllability, but if something goes screwy, its great to be able to disable it mid fight.
Make sure you mount it in a foam block with a recess cut out for it to protect it against mega-G shocks from spinner hits.
Also, be *careful* while setting up and testing. Get one of the switches back-to-front, or turn your robot upside down (if invertible) with certain drive combos, and your robot will go into "The Gyro Death Spin" as the Gyro applies the wrong polarity/direction correction signals and keeps your robot at full-speed turning.
My PC still bears a nice gash across the front of it from I.G. doing that a few years back.. lucky I was sitting on a chair and could lift my feet out of the way ! 
Best bet is to do all testing with the robot sitting on a stable block with the wheels off the ground until you have it all figured out.
401 gyros have two modes. Heading-Hold and Heading-Lock. (called AVCS in Futaba Speak). Often the switching between these two modes is controlled by the remote gain channel.. positive channel (stick forward of center) is sensitivity in one mode, and negative channel (stick backwards of center) is sensitivity in the other direction.
Most robots work better with heading-hold, rather than heading lock, but you should experiement to see which you like better.
Heading lock remembers which direction the bot was facing in and if it is moved off that direction without the radio commanding it to, the gyro will attempt to move it back to facing that direction by itself.
Heading Hold applies opposing forces *during* any uncommanded turns, but does *not* attempt to return the bot to its previous heading (direction facing). It fights against any turning errors, but as soon as the error movement stops, it stops opposing it, leaving the bot facing in whichever direction it ended up.
There arent too many drivers with experience with setting up 401 style gyros. Glen and myself are the only ones I know of.. They are quite a bit more complex than most gyros, but well worth it once you figure it out. Anyone in Bris (youre from there ?) who can help ? Perhaps the Kerrisons ? Aaron ? Hopefully so, since figuring out by yourself will take some time head scratching.
_________________
Great minds discuss ideas. Average minds discuss events. Small minds discuss people
|
 Tue Jan 04, 2011 12:58 pm
Tue Jan 04, 2011 12:58 pm |
|
|
|
|
Glen
Experienced Roboteer

Joined: 16 Jun 2004
Posts: 9481
Location: Where you least expect
|
Brett summed it up nicely, with two controllers you'll need an onboard mixer to make it work - mixing the channels in the radio itself won't work!
Its been a long time since i've toyed with a gyro but there's 6 main adjustments on the genuine futaba 401, not too sure about the HK one but im sure they're similar.
Digital analogue - apparently works with digital servos. not our concern so leave it on analogue.
AVCS mode on/off - some wanky word soup name from futaba, but my understanding was that with it off, the gyro will apply a set amount of correction for a set amount of deviation off course, this is less accurate.
With it on, when something pushes the robot past its set heading (when you let go of the transmitter sticks) it will correct itself back to that exact heading. You can see it when you put the robot into a spin and stop, itll turn itself in the opposite direction really quick. Definitely have it on. it worked heaps better with this setting on my robot
Invert - Like the servo reverse on the radio. sometimes the gyro is back to front and you have to flip its output around to make it work.
Delay - how long you want the gyro to wait before reacting. In a robot set it to 0 - we want instant gratification 
The manual says it can be used to stop hunting (which is the robot wiggling back and forth trying to point itself in the exact right direction, but it cant cause of slack in the drivetrain) but i didnt find that to help at all.
Limit - The maximum amount of correction the gyro will apply. IIRC mine was always set to 100%.
Gain - this is the one thats adjusted on the radio. Gain is more or less how sensitive the gyro is. If you wind it right up then the robot will just wiggle back and forth (hunting) and make it pretty uncontrollable. oh the irony.
Theres a perfect setting for gain where the robot drives straight and stops dead when you let go of the sticks without hunting at all. Too little and it wont really do either. too much and it just hunts so bad its uncontrollable and really hammers the motors with constant back and forth changes.
Also gain is good for, as Brett said, turning the gyro off totally when your upside down or if the gyro moves big time in a fight and starts hampering your control.
Some Things you need to look out for however -
** gyro drift - after a fight i always found that the robot would slowly start turning to one direction or the other, and id have to lower the gain a little to stop it. In the end it was the gyro moving and causing it to go "off" a little.
The gyro has to be mounted really solid so it cant move at all, but also needs some shock mounting so the flimsy casings dont break. Thats the tricky part!
Mine was very reliable and accurate after i did a proper mount for it.
** Mounting location - I had the gyro in the dead center of the robot for half its life and offset to the side for the rest. It was hands down more accurate in the center but not by that much. I had to move it to have enough room for the solid mount. So try mount it in the middle of the robot if you can, but if not, then thats not a big problem.
So yeah, hope that isnt too complex just have a play around and change one setting at a time to see what it does. It all becomes clear after a while.
|
|
Tue Jan 04, 2011 3:55 pm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

 RoboWars Australia Forum Index
-> Technical Chat
RoboWars Australia Forum Index
-> Technical Chat